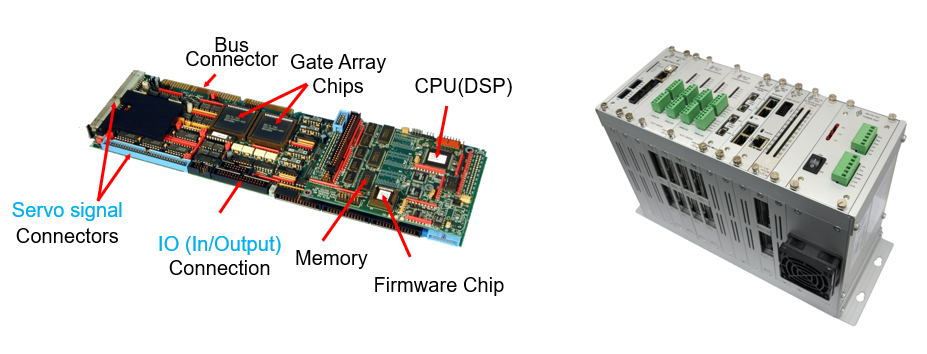
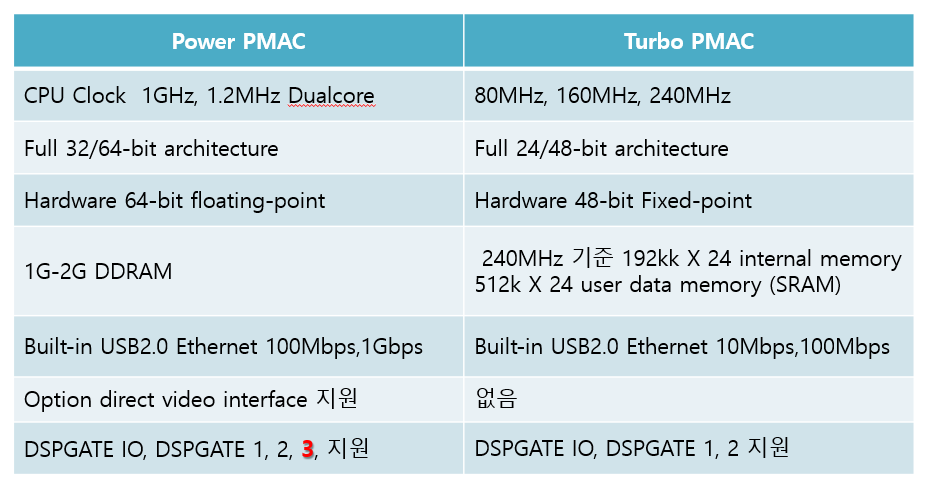
• FAST CPU 56301, 2, 3, 9, 11(Flex) – 40 – 240Mhz (x1.5 eq.), Large Memory
• Flash-Ram and Real-time Clock, with ID chip
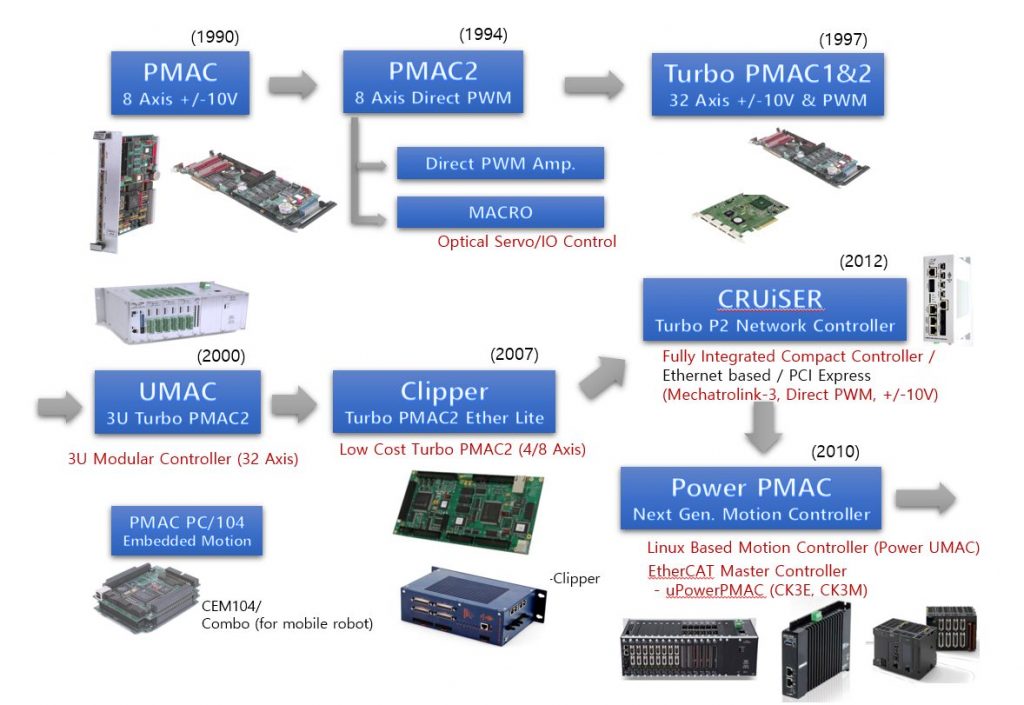
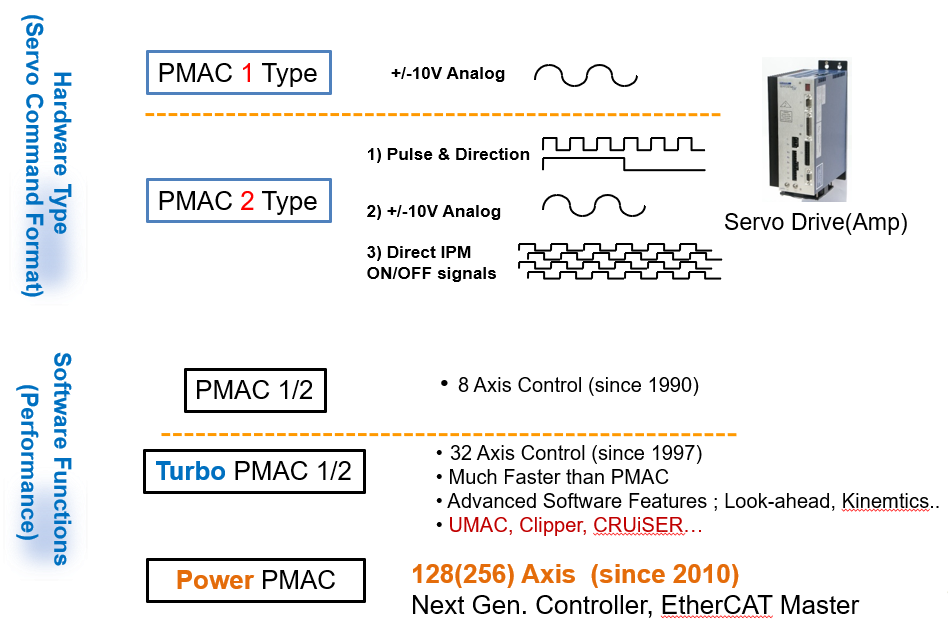
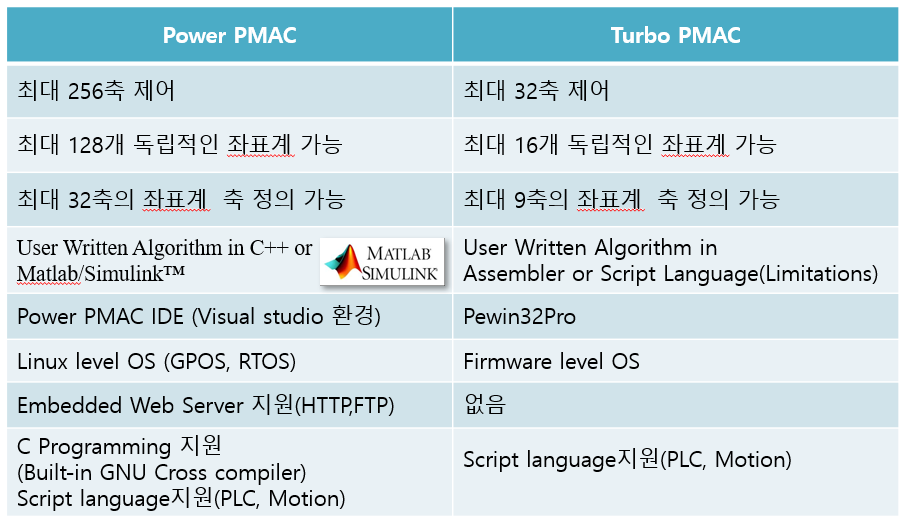
• 32 Axis control in 16 Coordinates
• PID (8) and Advanced Pole Placement Servo Algorithm (32 parameters)
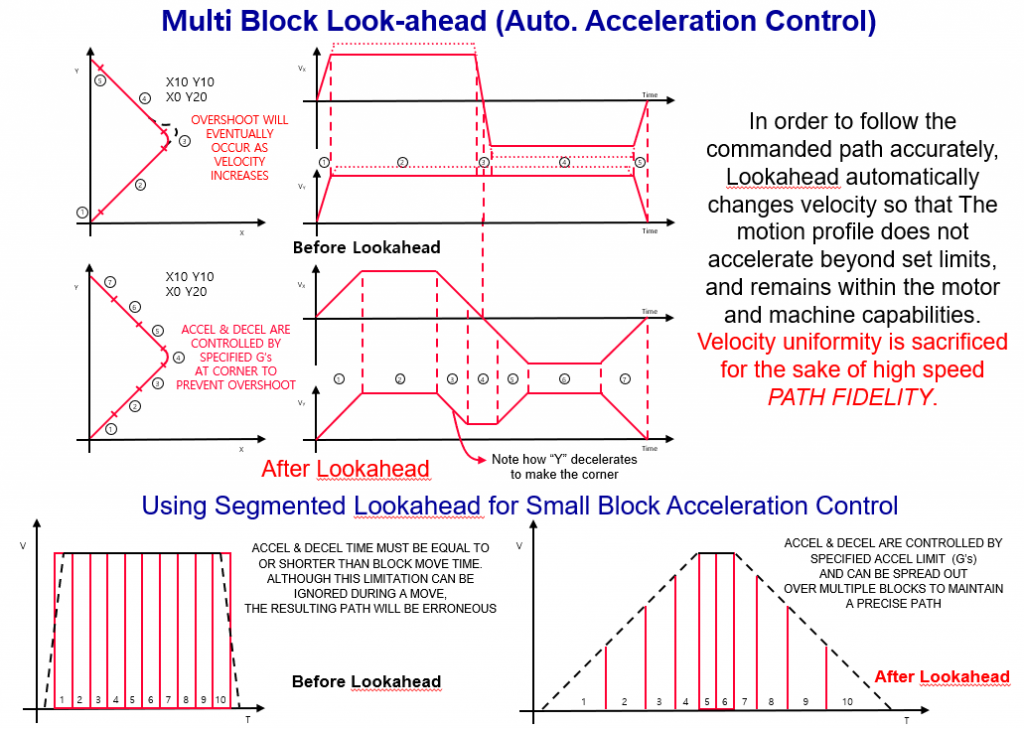
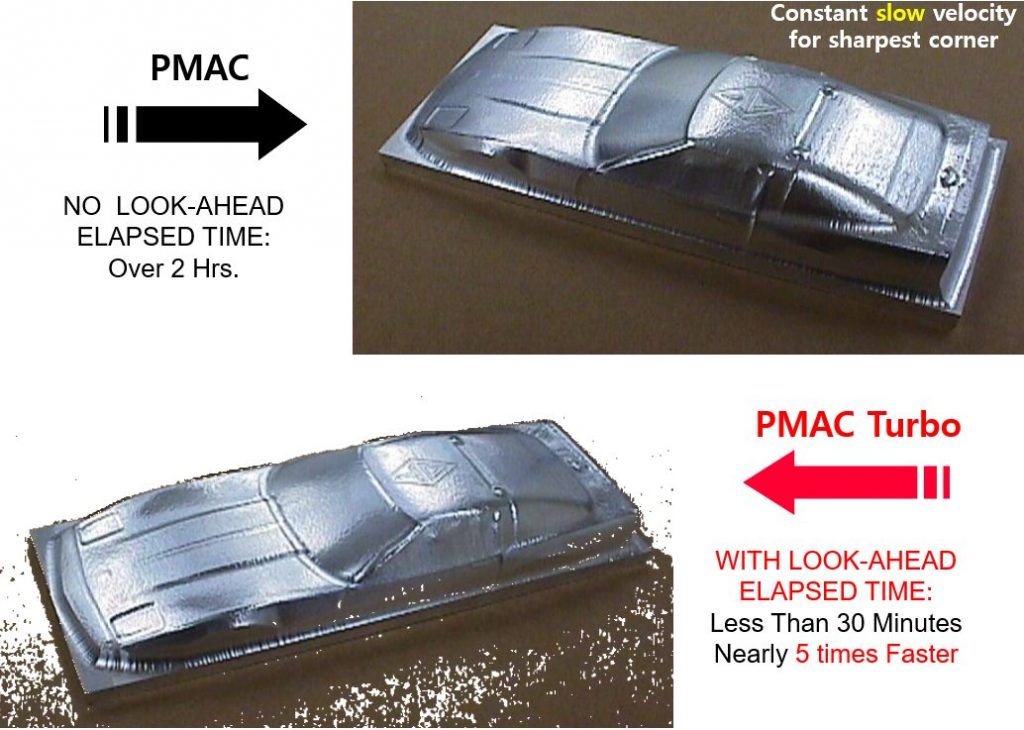
• Multi-Block High Speed, Segmented Lookahead with Synchronous I/O Capability
• Acceleration & Jerk Control
• Reverse & Retrace capability
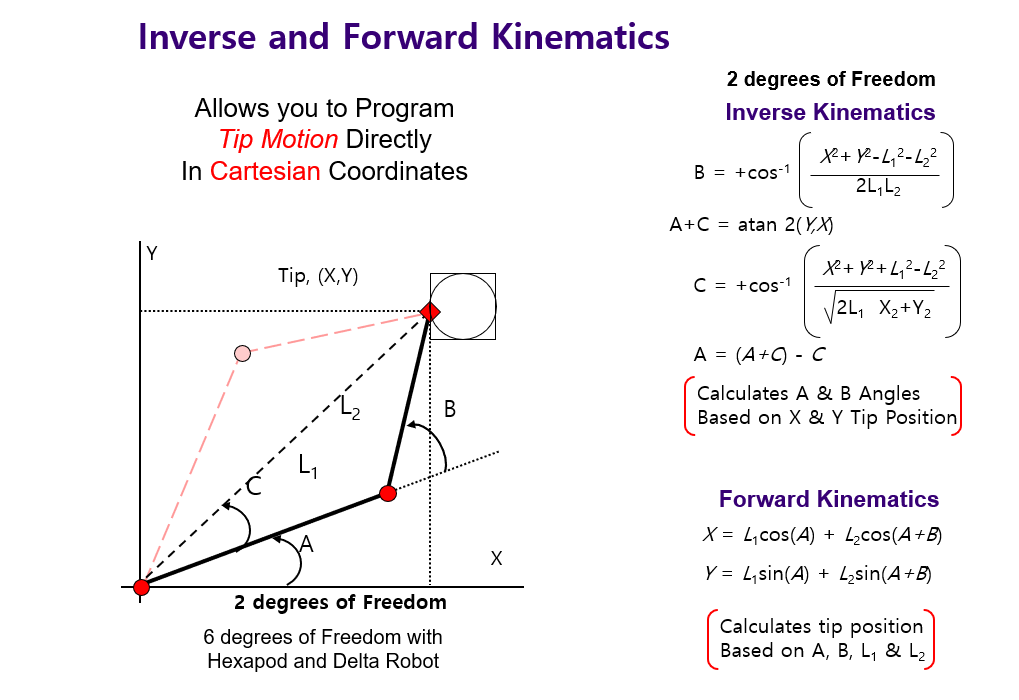
• Inverse Kinematics & 5th Axis NC Applications
• Cascaded Servo loops (Velocity/Force Loop)
• Auto ID – Identify and Verify Peripheral Connection on Power Turn-on
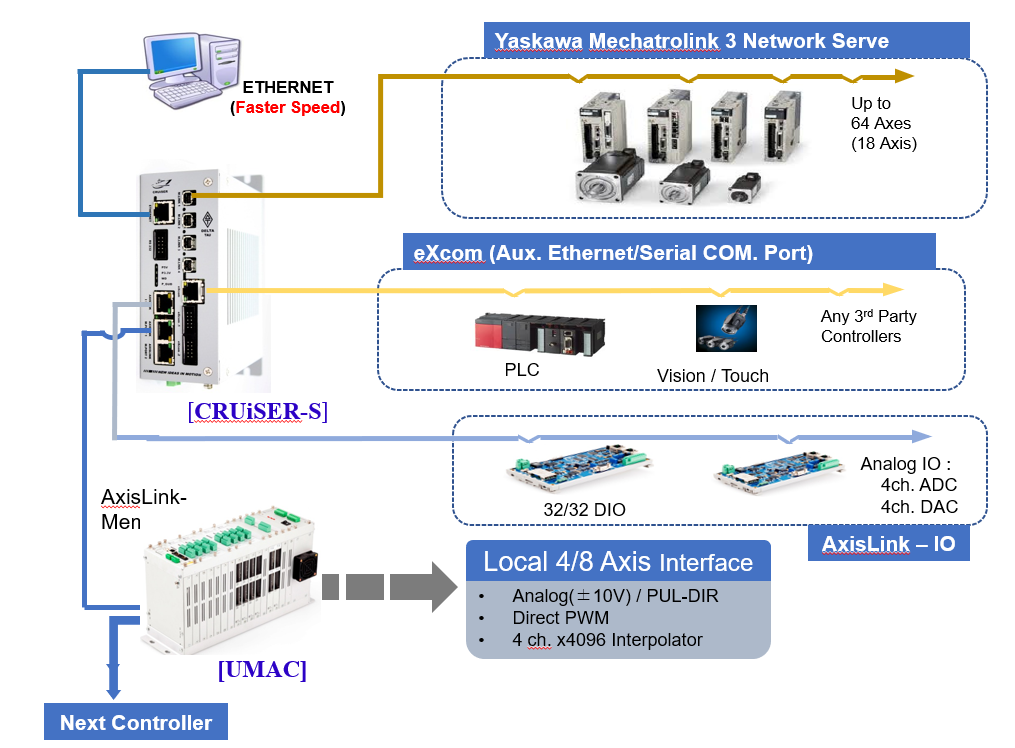
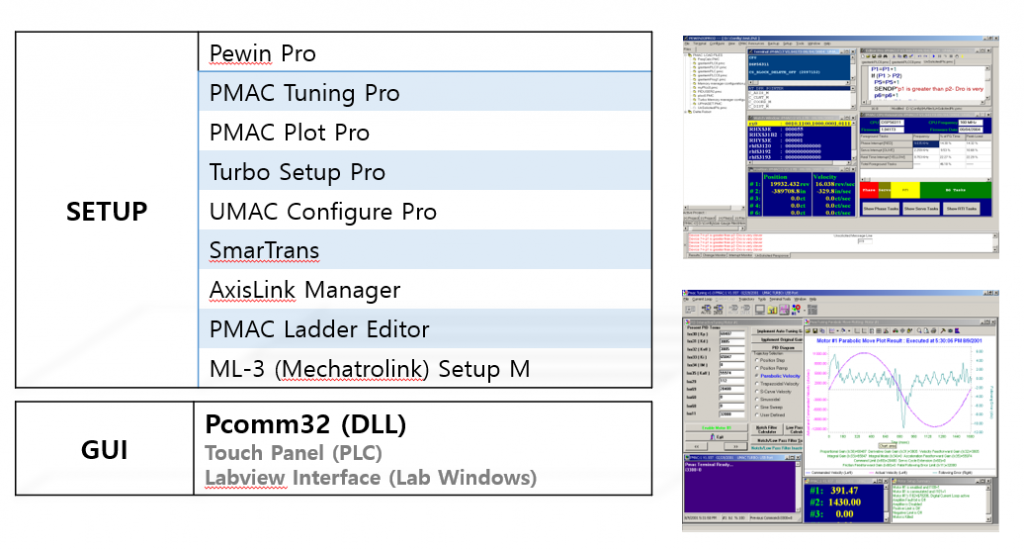
• Multiport Communication with Scheduler
a) USB2 & Ethernet b) 2x RS232 ports c) Parallel Host Port
d) Internal & External Dual Port RAM e) PLC f) MACRO (optic fiber)